










Kaynak Deposu
Görüntü İşleme
Kaynak Noktası Tespiti
Kaynak Deposu
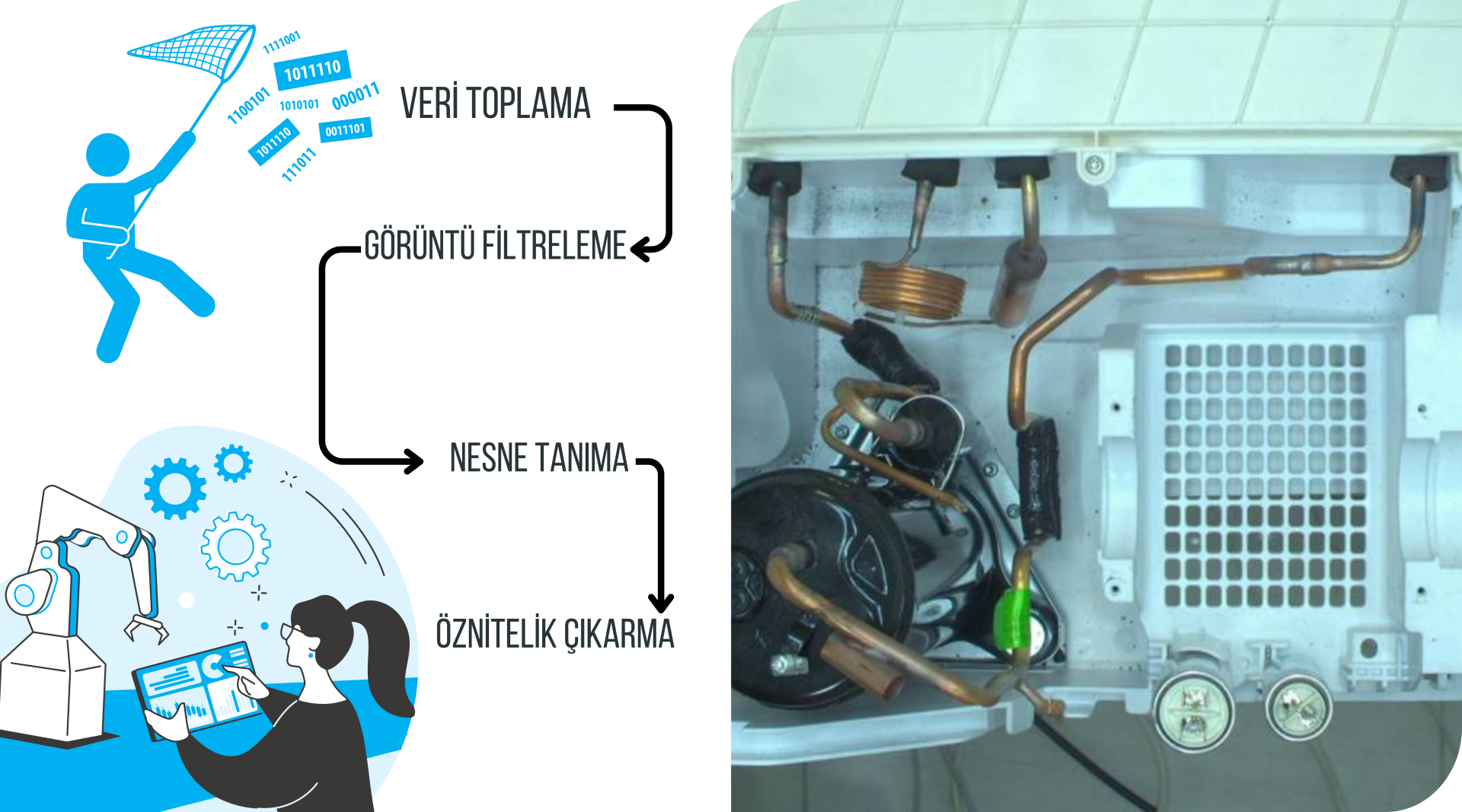
- İlk adım, robotlar tarafından görüntünün yakalanması ve işlenmesidir. Bu süreçte, kameralar veya diğer görüntü sensörleri kullanılarak çalışma alanındaki veri toplanır.
- Yakalanan görüntüler daha sonra yapay zeka algoritmaları kullanılarak işlenir. Bu işlem, görüntüyü filtreleme, öznitelik çıkarma, nesne tanıma ve yer tespiti gibi adımları içerir. Yapay zeka, öğrenme yetenekleriyle görüntü verilerinden desenler ve öznitelikler çıkarabilir.
Görüntü İşleme
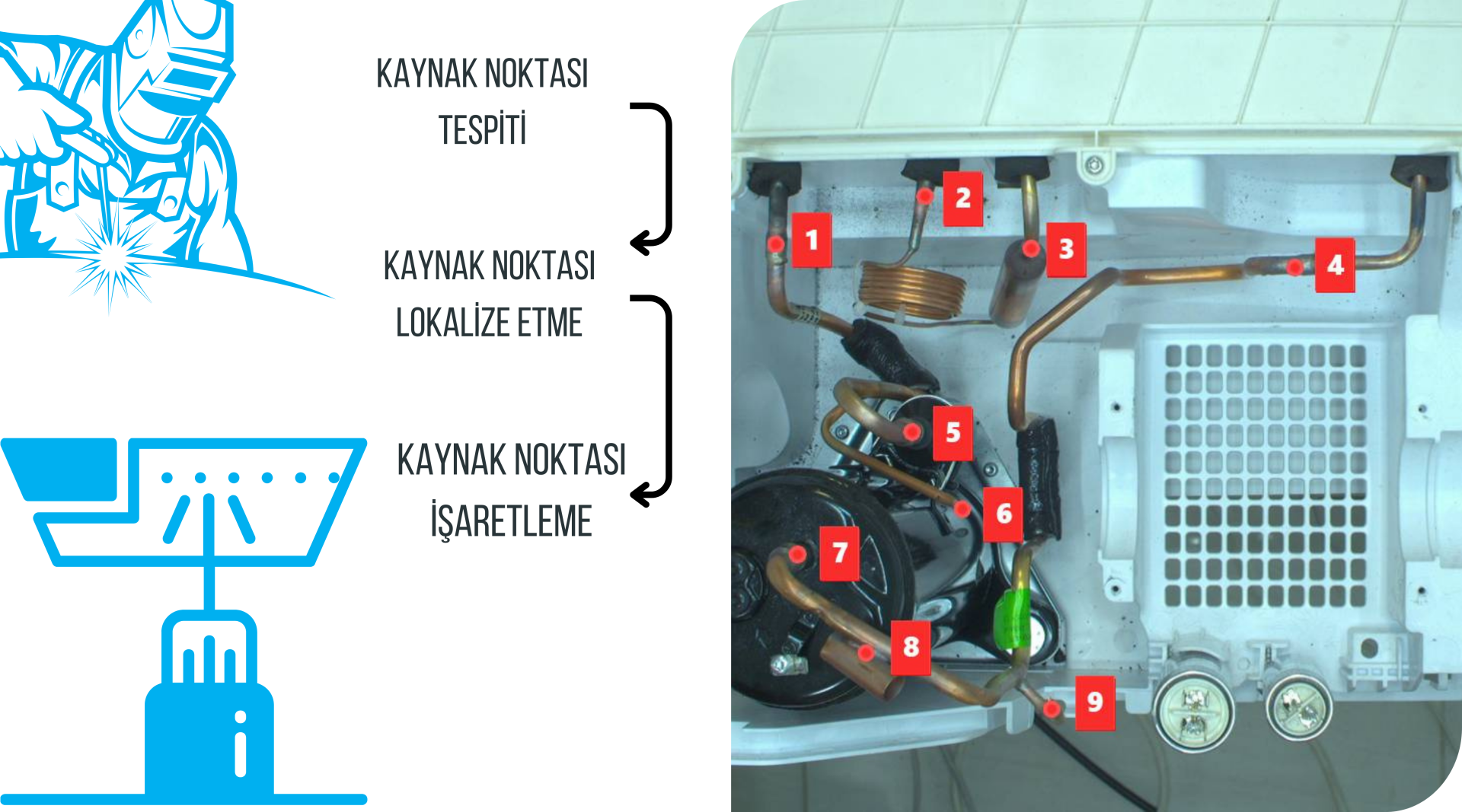
Kaynak Noktası Tespiti ve Lokalizasyonu:
- İkinci adımda, yapay zeka algoritmaları kullanılarak görüntüdeki kaynak noktaları tespit edilir ve lokalize edilir.
- Yapay zeka, belirli kriterlere göre kaynak noktalarını tanımlayabilir ve işaretleyebilir. Örneğin, aşırı sıcaklık veya belirli bir desen gibi belirli özelliklere sahip noktalar tespit edilebilir.
- Üçüncü adımda, tespit edilen kaynak noktaları, robotlar aracılığıyla işlenir ve gerektiğinde tepki verilir.
- Robotlar, tespit edilen kaynak noktalarına göre belirlenen işlemleri gerçekleştirebilir, örneğin, bir kaynağı veya bir parçayı taşımak veya belirli bir konuma yerleştirmek.
- Bu süreçte geri bildirim, robotların işlem başarısını ve doğruluğunu değerlendirmek için kullanılabilir. Yanlış tespitler veya hatalar durumunda düzeltme yapılabilir ve sistem sürekli olarak iyileştirilebilir.
Kaynak Noktası Tespiti

Robotik İşlem ve Geri Bildirim:
- Üçüncü adımda, tespit edilen kaynak noktaları, robotlar aracılığıyla işlenir ve gerektiğinde tepki verilir.
- Robotlar, tespit edilen kaynak noktalarına göre belirlenen işlemleri gerçekleştirebilir, örneğin, bir kaynağı veya bir parçayı taşımak veya belirli bir konuma yerleştirmek.
- Bu süreçte geri bildirim, robotların işlem başarısını ve doğruluğunu değerlendirmek için kullanılabilir. Yanlış tespitler veya hatalar durumunda düzeltme yapılabilir ve sistem sürekli olarak iyileştirilebilir.